




36Kr Japanで提供している記事以外に、スタートアップ企業や中国ビジネスのトレンドに関するニュース、レポート記事、企業データベースなど、有料コンテンツサービス「CONNECTO(コネクト)」を会員限定にお届けします。無料会員向けに公開している内容もあるので、ぜひご登録ください。
セミナー情報や最新業界レポートを無料でお届け
メールマガジンに登録
人型ロボット(ヒューマノイド)の開発を巡る競争が、いま静かに焦点を変えつつある。AIモデルの性能や関節構造の巧拙ではなく「どのようなデータを、どのような考えで集めているか」によって、性能で決定的な差が付くことになる。2025年12月4日、モーションキャプチャー世界最大手「Noitom Technology(諾亦騰科技)」の共同創業者である戴若犂(Triston Dai)氏が語った。
同社はこれまで映画やゲーム向け技術で知られてきたが、ロボティクス分野の売上が直近2年間で10倍以上に成長した。その背景には、人工知能モデルの学習に不可欠な「人間の動作データ」への需要急増がある。エンボディドAI(身体性のある人工知能)が「人間の動きを学ぶ存在」へと変わったためだ。2025年初めには、戴氏が創業者兼CEOを務めるロボティクス事業部「Noitom Robotics(諾亦騰机器人)」を独立させた。
中国では、アリババや智元機器人(Agibot)、バイトダンス(字節跳動)、小鵬汽車(Xpeng)、テンセントなど主要ロボットメーカーのほぼ全社がNoitom Roboticsのデータを活用しているという。日米の大手企業や代理店との連携も着実に進めており、すでに試験運用を始めている。

人間中心データ
現在、多くのロボット企業が採用しているのは、人間がモーションキャプチャーを装着してロボットを遠隔操作し、学習用データを集めるテレオペレーション(遠隔操作)方式である。高精度という利点はあるものの、戴CEOはこの手法が量産段階に向かないことを明確に指摘した。操作速度は遅く、コストが高く、指先の繊細な動きや両手を使う複雑な作業には限界がある。
さらに決定的なのは、ロボットごとにデータが分断され、他機種に転用できない点だ。データが蓄積されても、資産になりにくい。最も深刻な第三の限界は、エンボディメント(身体性)の壁だ。「宇樹科技(Unitree)」や智元機器人のロボットで収集したデータは、米テスラの「Optimus(オプティマス)」といった異なるメーカーでは使用できない。「新しいロボットモデルが登場するたびに、全てのデータを最初から収集し直さなければならない」と戴CEOは述べた。
この構造的問題に対し、Noitom Roboticsが打ち出したのが「人間中心データ」という考え方だ。ロボットを介して人間の動きを記録するのではなく、人間の行動そのものを高次元かつ多くの手法で直接取得し、後から各ロボットに合わせて再ターゲティングする。発想の起点をロボットから人間へと切り替えることで、データの汎用性を確保しようという試みだ。
データ工場
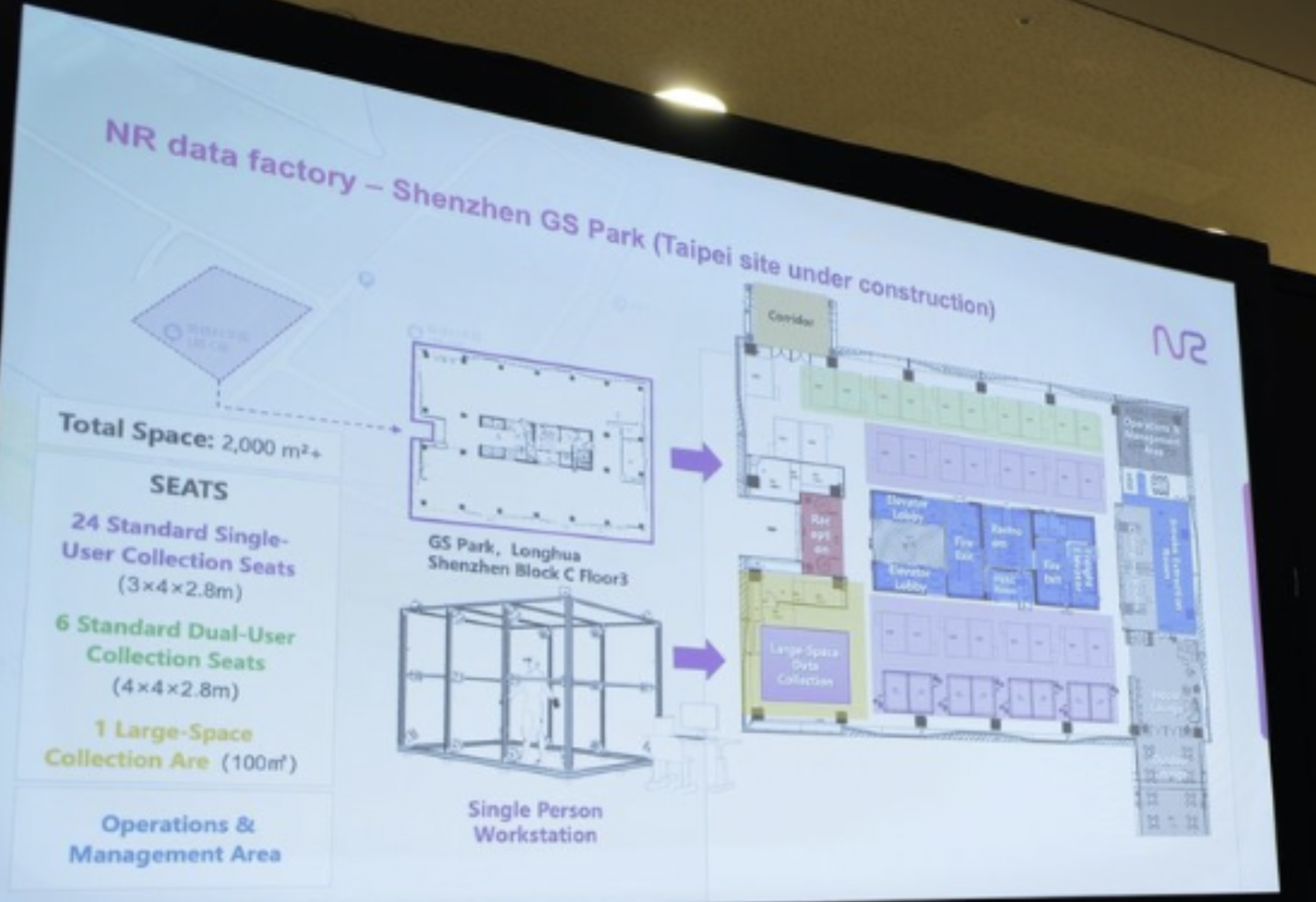
同社が深圳などで構築を進める専用データ収集施設「データ工場」は、その象徴的な取り組みである。モーションキャプチャーに加え、視覚、触覚、音響など複数のセンサーを組み合わせ、人間が物と相互作用する過程を丸ごと記録する。重要なのは、現時点でロボットが再現できる動作に限定しない点だ。将来のハードウエア進化を見据え、人間本来の動作をできる限り高い解像度で残しておく。戴CEOは「データを消耗品ではなく長期資産として扱う発想」だと説明する。
Noitom Roboticsは深圳にデータ工場を建設中で、1施設につき50ポッド(収集ユニット)を設置する。台北のパートナー施設と合わせ、年間20万時間の高品質データを生産できる体制を整えつつある。さらに、台北以外にも世界各地の都市でデータ収集施設の構築を進めているという。各ポッドには姿勢センサー、タクタイルセンシンググローブ、温度センサー、LiDAR、RGB・RGBDカメラなど多様なセンサーを装備。「ロボットが必要とするよりも高い次元・高い精度でデータを収集することで、様々なロボット仕様に後からマッピングできる柔軟性が生まれる」と戴CEOは説明する。
工場内だけでなく、実際の家庭や工場など「ワイルド環境」と呼ばれるデータ収集も重要だ。このため、軽量なウェアラブルシステムも開発。カメラを装着した人物視点のエゴビジョン収集用ヘッドセットには複数のカメラが搭載されている。
データピラミッド理論:4層の戦略的アプローチ
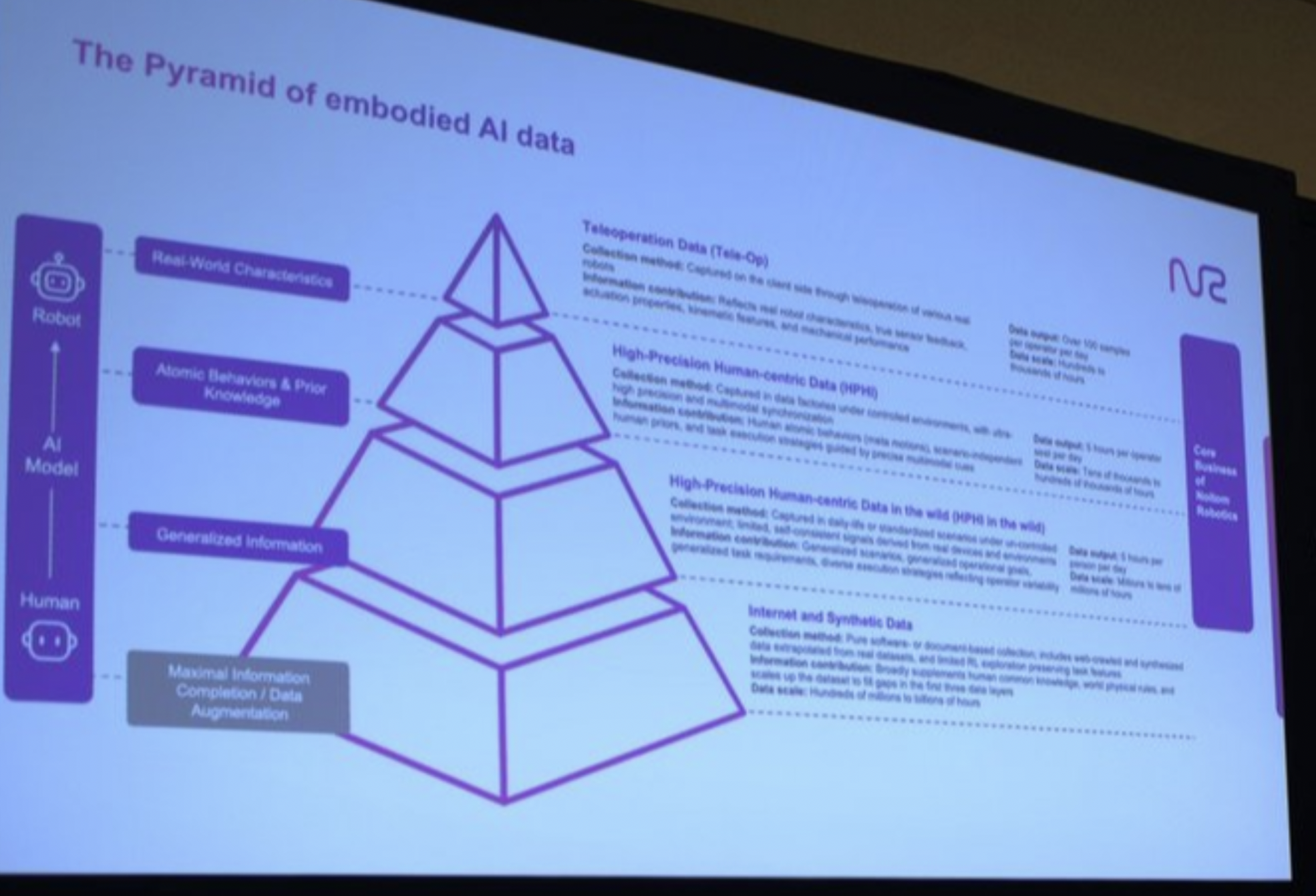
戴CEOは「データピラミッド」理論を提示する。ロボット訓練に必要なデータを4層に分類し、それぞれ異なる役割と規模を割り当てる。
最上層(数千時間)は、実機によるテレオペレーションデータで、ロボット固有の特性を学習する。高品質だが高コストで汎用性は低い。
第2層(数十万時間)は、工場内で収集したヒューマンセントリックデータ。基本的な動作パターンを学習し、高精度でクロスエンボディメントが可能だ。
第3層(数千万時間)は、ワイルド環境で収集したヒューマンデータ。汎用的な知識を学習でき、スマートグラスなどを用いて効率的に大量収集できる。
最下層(数億時間)は、インターネット動画や合成データで、事前知識やルールを学習する。
「各層は2桁ずつスケールが異なる。現在、多くのパートナーから100万時間以上のデータセット提供を求められている」と戴CEOは語る。興味深いのは、合成データと実データの役割の違いだ。「AIはルールを合成できるが、人間の経験は合成できない。実データは、人間が持つ暗黙知や経験的知識をモデルに提供するために不可欠だ」と説明した。
ハードウエアの壁:自由度不足という課題
データ収集の進展とは対照的に、ロボットハードウエアの限界も存在する。特に深刻なのがロボットの手になるデキスタラスハンドの自由度不足だ。
「人間の手は45以上の自由度を持っているが、現在最高レベルのロボットハンドでも22自由度しかない」。市販の人気モデルでは6〜7自由度に留まる。モーターの小型化・軽量化の技術的困難さと、複雑な構造の製造コストが障壁となっている。
「データ、モデル、ハードウエアの3つが同時に進化しなければ、真に器用な動きができるロボットは実現できない」と戴CEOは強調する。
Noitom Roboticsの動きが示しているのは、人型ロボットの競争が「誰が最初に完成形を作るか」から「誰が学習基盤を押さえるか」へと移行している現実だ。人間の行動をどう定義し、どう蓄積し、どう共有するのか。その設計思想そのものが競争力になる時代が始まっている。Noitom Roboticsは競争激化が進む中国ロボット市場で、人間のデータを起点に独自の立ち位置をつかみつつある。
(36Kr Japan編集部)
36Kr Japanで提供している記事以外に、スタートアップ企業や中国ビジネスのトレンドに関するニュース、レポート記事、企業データベースなど、有料コンテンツサービス「CONNECTO(コネクト)」を会員限定にお届けします。無料会員向けに公開している内容もあるので、ぜひご登録ください。
セミナー情報や最新業界レポートを無料でお届け
メールマガジンに登録





















