36Kr Japanで提供している記事以外に、スタートアップ企業や中国ビジネスのトレンドに関するニュース、レポート記事、企業データベースなど、有料コンテンツサービス「CONNECTO(コネクト)」を会員限定にお届けします。無料会員向けに公開している内容もあるので、ぜひご登録ください。
原文はこちら
セミナー情報や最新業界レポートを無料でお届け
メールマガジンに登録
中国のロボットメーカー「宇樹科技(Unitree Robotics)」が開発した人型ロボット「Unitree G1」に再び注目が集まっている。これまで滑らかなダンスを披露し話題となったG1が、今度は少林寺拳法の訓練さながらの機敏な動きをを実演し、驚きを呼んだ。
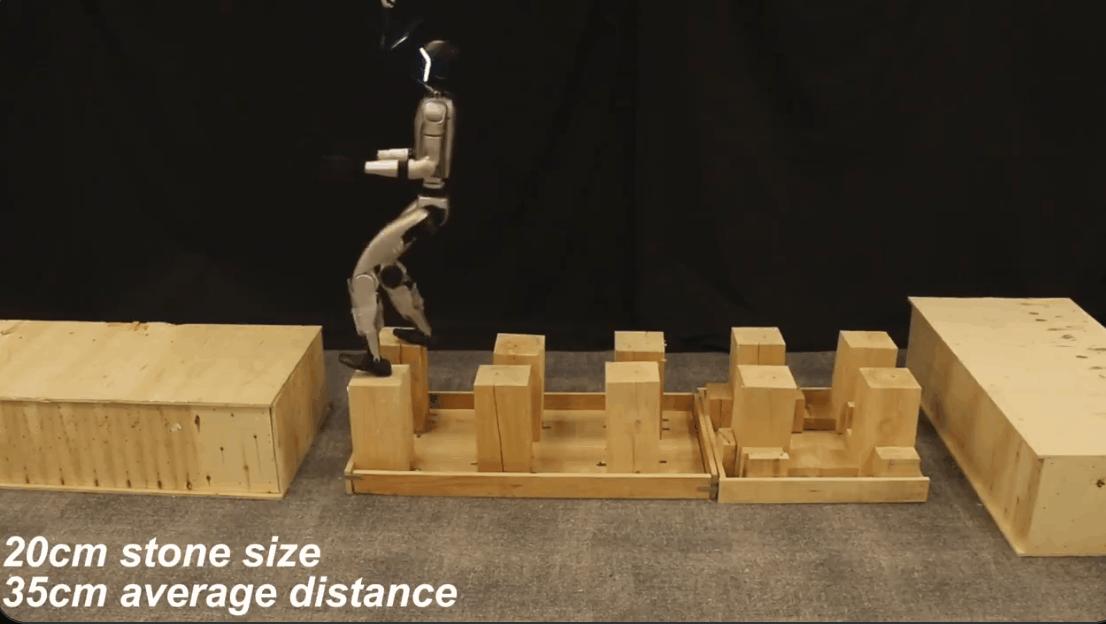
G1の新たな動作を支えるのが、上海AI実験室、上海交通大学、浙江大学、香港大学、香港中文大学が2月19日に共同発表した新たな強化学習フレームワーク「BeamDojo」だ。この技術により、ロボットが飛び石や平均台のように狭い足場でも、足を下ろす場所を正確にコントロールして確実に移動できるようにした。
人型ロボットが不安定な足場を歩くには、センサー情報を正確に処理して安全な場所に足を置きつつ、脚部の安定を保たなければならないが、2つの技術的な課題に直面した。
まず、四足歩行ロボットで実現した方法は人型ロボットでは使えなかった。四足ロボットの接地面は半球状で、足場の小さい危険な地形を移動できるようになっているが、一般的な人型ロボットの足底部は平坦であり、同じ手法では対応が難しかった。また、人型ロボットが足を置く位置を評価する報酬信号がまばらなため、学習プロセスの効率が極めて低く、信頼できるセンサーデータを取得しにくかった。
これらの課題を克服するために開発されたのが「BeamDojo」だ。Unitree G1はデモンストレーションで、ランダムに並ぶ約20センチ四方の角材の上を前進するだけでなく、後ろ向きに歩く様子も披露し、20センチ幅の平均台も難なく渡りきった。

さらに、6キログラムの荷物を抱えた状態でも、後ろから衝撃を加えられても、Unitree G1は複雑な地形を歩ききることに成功した。


SNSでは、「動作がまるで少林寺の武僧の訓練のようだ」とのコメントも寄せられ、話題となっている。

上海交通大学のHuayi Wang氏は、BeamDojoの革新性を4つ挙げた。
1)2段階の強化学習。1段階目では平地での訓練を実施し、あらかじめ安全な環境でアルゴリズムを学習させ、2段階目で実際の地形に切り替えてポリシーの最適化を進めた。
2)多角形の足底部に対応する報酬メカニズムと2つの評価モジュールを組み合わせ、移動に関する報酬と足を置いた位置に関する報酬の学習プロセスのバランスをとった。
3)LiDARに基づき標高を測れる地図システムを搭載。人型ロボットがリアルタイムで細かい地形を検知し、正確な場所に足を運べるようにした。
4)サンプル不要の汎化能力を実現。人型ロボットは初見の地形でも、過去の学習で獲得したスキルを活用して移動できるようになった。

今回の実験で、BeamDojoがシミュレーション環境で効率的な学習を実現し、現実の環境で人型ロボットが複雑な足場を機敏に移動したり、外部からの妨害があってもさほど影響を受けないようにしたりできることが明らかになった。今後は、飛び石状の足場を移動するだけでなく、溝や谷間状などより複雑な地形への応用も進められる。
作者:智東西(WeChat公式ID:zhidxcom)
(翻訳・田村広子)
36Kr Japanで提供している記事以外に、スタートアップ企業や中国ビジネスのトレンドに関するニュース、レポート記事、企業データベースなど、有料コンテンツサービス「CONNECTO(コネクト)」を会員限定にお届けします。無料会員向けに公開している内容もあるので、ぜひご登録ください。
原文はこちら
セミナー情報や最新業界レポートを無料でお届け
メールマガジンに登録