関節にモーター不要ーー深圳発ソフトロボット、「腱伝達」で35Kg持ち上げる

中国・深圳発のソフトロボット開発スタートアップ「擎羽科技(Feagine Robotics)」がこのほど、エンジェルラウンドで数千万元(数億円)を調達した。出資は徳迅投資(Decent Capital)が主導し、既存株主の奇績創壇(MiraclePlus)も参加。資金は、技術開発や製品の商用化に充てられる。徳迅投資は、著名な人型ロボットメーカーの宇樹科技(Unitree Robotics)にも早い段階で出資していた。
2025年3月に設立された擎羽科技は、生物模倣(バイオミメティクス)ロボットの研究開発を手がける。しなやかな動きを可能にする「柔軟制御(コンプライアント制御)」技術を活用してロボットアームに人間のような柔軟性を持たせようとしており、すでに数十台のプロトタイプを作っている。創業者の彭鋭CEOは、香港大学でロボット工学の博士号を取得し、ドローン世界大手DJIでエンジニアとして勤務した経歴を持つ。
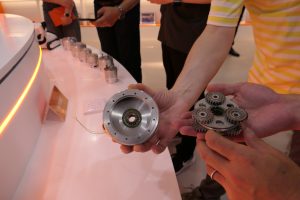
従来の高剛性ロボットが、特に日常生活で使う際に重さや硬さ、安全性の低さといった課題を抱える中、同社は「遠隔制御+腱伝達」ソリューションを独自に開発した。このソリューションでは、アクチュエーターをロボットの架台もしくは関節から遠い位置に集約し、強度の高い腱を通じて関節に力を伝達する。
これによって、性能は以下のように大きく向上する。
・軽さと強度:関節はモーターが無い分だけ軽くなり、慣性が大きく低減する。実験データによると、関節の最大荷重は自重の5倍に相当する35kgに達し、動作寿命は1000万回を突破。
・柔軟性:自由度に制限があった剛性構造とは異なり、関節は8自由度であらゆる方向に動く。ロボットはエンドエフェクタを通じた点の動きだけでなく、生物の肢体のようにさまざまな物体に巻き付くなどして、複雑な動的環境にも適応する。
・安全性:柔らかさは物理的な安全性につながる。ロボットと人間が偶発的に衝突しても、柔軟な関節が変形しながら衝撃を吸収することでケガのリスクを低減し、人とロボットの自然な共存を実現できる。
同社は制御アルゴリズムとして、ハードウエアとソフトウエアが連動する「ロボット本体+小脳」システムを開発した。関節全体に分散型センサーを配置し、リアルタイムで収集した動作データを自社開発のシミュレーションプラットフォームに送ることで、大量の学習データを生成する。
システムは学習を通じて、少量の実データでタスクの成功率を95%以上に向上させられるようになり、大量のラベル付きデータに対する依存度を大きく低減させた。エンドエフェクタはミリメートル単位の精度で制御され、物をつかむ、置くといった細かいタスクを安定的にこなすことができ、ハードウエアに柔軟な頭脳を搭載することが可能になった。
同社は製品をさまざまなシーンで活用するため、部品をブロックのように組み合わせられるモジュール化設計を採用した。中核となる制御モジュールを自由に組み立てられるほか、ユーザーが関節の数の増減や長さの調節(10cm~2m)を行ったり、外殻をメタリック素材や人工皮膚に替えたりすることも可能だ。この設計方式によって、顧客企業の要望に素早く対応し、短期間で活用シーンに適した専用ロボットを供給できる。
彭CEOは、当面は人工知能(AI)が人間の脳に代わって高度な意思決定を下すようになるのは難しいとしつつ、人間の身体機能には限界があるため、生体模倣型のソフトロボットが、人間の意思の遂行を広げる最適な手段になるとの見方を示した。同社は、特定の形態を持つロボットの開発にとどまらず、全く新しい制御方法の確立にも注力しており、人間とロボットの共存を支える技術の開発を進めている。
*1元=約23円で計算しています。
(翻訳・大谷晶洋)
関連記事



関連キーワード
日本企業のDXを促進するプラットフォーム「CONNECTO」
無料コンテンツ公開中