16関節・人間超えの動作精度——中国「知行機器人」がロボットハンドで23億円調達
中国発のロボットハンドメーカー「知行機器人(Changingtek Robotics)」はこのほど、シリーズB+とB++で累計約1億元(約23億円)の資金を調達した。出資は、大手機械メーカーの山東威達(Shandong Weida)が主導し、国興投資や、蕪湖科創などのファンドも参加した。調達資金は主に製品開発の強化、データ収集システムの構築およびグローバル市場の開拓に充てられる。
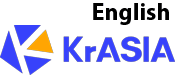
知行機器人は2018年に設立され、高性能なロボットハンドやフィジカルAIの中核部品の研究開発に注力している。現在、0.1㎏から150㎏までの負荷をすべてカバーするロボットハンドの製品ラインアップを構築している。エンドエフェクタ(ロボットが実作業を行う先端部品)の製品ラインが中国で最も充実したメーカーの一つとされる。
2本から5本指・両腕プラットフォームへ
エンドエフェクタは、ロボットが実作業を完結させる「最後の1センチ」を担う部位であり、ハードウエアシステムの中でも極めて複雑なモジュールのひとつである。
知行機器人は「技術基盤の共通化と、活用シーンへの緻密な最適化」を戦略に掲げている。定型化された産業現場には、効率的な二本指や三本指のハンドを供給する一方、複雑で非定型な作業が求められる現場向けには、より柔軟な動きが可能な五本指ハンドの開発を進めている。
2025年後半には、四本指製品「霊思手」を発表した。複数の部位が連動するリンク機構と統合制御システムを採用し、12の関節、8つの可動軸(自由度)を備えている。5kgまでの重さに耐える強力な握力を持ち、物流の仕分けや工場の搬送業務などに適用される。また、駆動部と制御部を一体化した設計により、外部配線を大幅に削減できた。これにより、応答速度や繰り返し作業の精度が大幅に向上しただけでなく、既存の協働ロボットやロボットアームへも容易に組み込めるようになっている。

2026年初頭に発表された「束巧手」は、人間の手の構造をモデルにしたワイヤ駆動式の5本指ロボットハンドである。16の関節と11の可動軸を備え、人間を凌駕するほどの緻密な動きを実現した。その革新的な左右の手の自動適応切替機能により、単一の装置で同時に両手の操作データを収集することが可能となり、データ収集コストを50%低減できる。現在、航空宇宙、医療リハビリなどのハイエンド分野で活用されている。

さらに、両腕が連動して動く「フィジカルAI」搭載のロボットプラットフォームも発表している。このプラットフォームは両腕での30kgの負荷耐性を持ち、アーム展開時の長さは850mm、垂直作業範囲は0〜2200mm、三次元環境認識精度は±0.1mmに達する。「霊思手」または「束巧手」と組み合わせることで、重度の負荷がかかる搬送と精密操作のタスクを実行できる。

同社の創業者兼CTOの白国超博士は「ロボットの完成品を作るのは、手・腕・目・脳の協調をよりよく理解するためであり、本体メーカーと競争するためではない」と指摘した。
差別化の鍵は「データの蓄積力」
競争が激しいロボットハンドの分野において、知行機器人の競争優位性はその「工業品質」の安定性にあるという。白博士は「我々はまず取り組むべき適切なシーンを見つけ、その上でロボットハンドの設計を決定する」と強調する。
同社は初期に航空宇宙、重負荷物流、電力設備といった参入障壁の高い分野に参入し、航空エンジンブレードの仕分けや電力設備操作などのシーンにおいて大量の高品質な業界データセットを蓄積し、それをモデル訓練にフィードバックすることで、「ハードウエア−アルゴリズム−アプリケーション」の正の循環を形成している。
産業シーンは信頼性に対する要求が極めて厳しく、知行機器人の製品は出荷前に厳格な寿命テストを通過する必要がある。その「データ収集用ハンド」は500万回以上の使用回数を実現しており、業界平均の100倍以上に達している。サプライチェーンの蓄積により、製品価格は同種の競合製品の半分に抑えられている。
2025年、知行機器人は数千セットの製品を量産出荷し、受注売上は約1億元に達したという。騰訊控股(テンセント)、華為技術(ファーウェイ)、人型ロボット新興の智元機器人(AGIBOT)」や「智平方(AI² Robotics)」、ロボットアーム大手「睿爾曼(RealMan)」など、業界を牽引する企業群のデータ収集ハードウェアの中核サプライヤーとしての地位を確立している。
白博士は、現在の業界競争の焦点はすでにハードウエアからデータの閉ループ能力へと移行していると強調する。「誰が現実のシーンでデータ閉ループを実現できるかが、大規模応用段階において主導権を握ることになる」と述べた。
*1元=約23円で計算しています。
(翻訳・36Kr Japan編集部)
関連記事



関連キーワード
日本企業のDXを促進するプラットフォーム「CONNECTO」
無料コンテンツ公開中