ヒューマノイド実用化、1000億件のデータがあっても足りない——中国で急拡大する「データ訓練」の現場

この1年間、後方宙返りやダンス、ボクシング、テレビ番組でのパフォーマンスなどを披露する中国製人型ロボット(ヒューマノイド)の動画がネット上にあふれ、エンボディドAIやフィジカルAIへの期待は一気に高まった。
AIロボットは今、実験室から現実世界へと急速に歩みを進めている。しかし華やかに見えるその裏側で、業界は「データギャップ」という巨大な壁に直面している。
その最前線、「ロボットの学校」と呼ばれるデータ訓練センターでは地道な作業が黙々と進み、スタッフがロボットに「部品をつかんでツールボックスに入れる」など基本動作の反復練習をさせている。この単調に見える光景こそが、ロボットが「受動的なプログラミング」から「能動的な意思決定」へと移行し、真の「知能」を獲得する重要なステップなのだ。
大規模言語モデル(LLM)の成功がインターネット上の膨大なデジタルデータに基づいているとするならば、エンボディドAIの課題は物理世界のデータをいかにしてゼロから積み上げていくかにある。実機データはロボットを現実世界と整合させる「ラストワンマイル」だが、希少なリソースであり、業界では最も大きな障壁だと認識されている。
ロボット産業の高度化の成否を決める「新たなインフラ」として、中国各地では現在、ロボット向けデータ訓練センターの整備が相次いでいる。
データを「育てる」工場の内側

スタッフがウェアラブル端末でロボットを遠隔操作し、作業させる
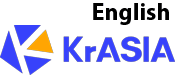
北京にある人型ロボットデータ訓練センターでは、データ収集のタスクが単純なものから複雑なものにまで分解され、厳密なプロセスに沿って進められている。集中訓練エリアでは、スタッフがウェアラブルデバイスによってロボットを操作し、把持や配置などの単一タスクを実行させる。シーン訓練エリアには無人スーパーや住宅の居間、寝室などの実環境が高度に再現されており、物品整理や衣服を折りたたむスキルを訓練している。
同センターを運営するロボットアーム大手「睿爾曼(RealMan)」によると、高品質データの収集には超高性能のロボット本体と高い技術が求められるという。まず、すべてのロボット本体に対して高精度キャリブレーションを実施し、57項目の状態データを収集する高精度センサーを搭載する必要がある。次に、「時空間の整合」という難題を解決しなければならない。視覚センサーや力覚センサー、関節センサーなどはそれぞれサンプリング周波数が異なるため、ミリ秒単位の誤差でもデータにずれが生じ、モデル学習を誤った方向に導いてしまう。そこで、同センターではロボット本体を同期させる手法を採用し、マルチモーダルデータを収集する際の誤差を1ミリ秒未満に抑え、モデルが因果関係を正確に学習できるようにした。
目下、同センターで生成される高品質データは1日平均で約6万件にのぼり、工業や家庭、リハビリなど16のシーンをカバーしている。
“方言”が乱立するデータの孤島
スタッフがロボットにデータ学習させる
中国ではすでに50カ所以上のデータ収集・訓練センターが稼働または計画されているが、AIロボットが必要とする膨大なデータの供給には、まったく足りていない。試算によると、ある業界で求められる作業の8割を実行させるには、必要なデータは少なくとも1億件、汎用型ロボットの場合は1000億件にのぼるという。
データ不足よりも深刻なのが、「データの異質性」の問題だ。各メーカーのロボットは、本体設計やセンサー位置、ソフトウエアプロトコルがそれぞれ違うため、収集されたデータはまるで「方言」のように互換性が低くなる。あるロボットで訓練されたモデルをそのまま別のロボットに適用しても、まったく機能しない場合があり、それぞれのデータセンターで得られた成果を重ね合わせるのも困難になる。これが新たな「データの孤島」を作り出してしまう。
この難題を解決するため、業界は3つの技術的アプローチを模索している。1つ目は「差異の遮断」であり、市場シェアの高い主流機種に訓練を施すことで、データの汎用性を追求していく。2つ目は「差異の受容」だ。上海張江ハイテクパークにある人型ロボット開発センターでは、メーカーも仕様も異なるロボットを同一空間で共同訓練させることで、AIが多様な物理世界に対する客観的な認識を確立できるようにしている。3つ目が「差異の回避」だ。人の動作を映し出した動画からその軌跡を抽出してモデルを訓練する方法や、実データからシミュレーションモデルを構築して実世界に適用する「Real2Sim2Real」モデルを採用することで、データ1件あたりのコストを1000分の1に抑えることが期待できるという。
現場で働きながら学ぶ
技術的アプローチに違いがあったとしても、実機データが必要不可欠な「試金石」であることに変わりはない。データ訓練の主なテーマは今、規模拡大から産業の切実なニーズに確実に対応することへと移行しつつある。
物流システムや電池リサイクルを手がける上場企業「天奇股份(Miracle Automation)」が音頭をとって設立したエンボディドAIロボット工業データ収集・実地訓練センター(江蘇省無錫市)では、自動車塗装など7種類のシーンをリアルに再現し、シーン・データ・AIモデル・応用を結ぶクローズドループを構築している。具体的な業務上の課題に焦点を当て、的確に収集したデータで専用モデルを訓練し、実際の生産ラインに投入して検証と改良を進めていく。この方式ならば、データ生成の方向性が明確になるだけでなく、ロボットに実際の問題を解決させる過程で質の高いデータが自然に蓄積していくようになる。

自動車塗装などの訓練をするエンボディドAIロボット
「タスク実行とデータ収集の同時進行」も先進的な試みとして注目を浴びている。2026年1月に米ラスベガスで開かれたテクノロジー見本市「CES2026」では、ロボットアーム大手の睿爾曼が展示ブースに設置したロボットを遠隔操作して搬送タスクを実行させ、各タスクの実行と同時に環境との相互作用やタスク結果を含む貴重なデータが生成されていく様子を披露した。この事例は、データファクトリーに世界各地にある生産・サービス用ロボットを直接接続すれば、実際の業務プロセスのなかでデータを継続的に蓄積できるようになり、将来的に実際のシーンの再現が不要になる可能性を示唆している。
このほか、業界ではロボットデータをリソース化する試みも始まっている。人型ロボットスタートアップ「帕西尼(PaXini)」は、そのデータセットを北京国際ビッグデータ取引所に登録しているほか、テンセントクラウドと共同で「データクラウドモール」の構築にも取り組んでいる。天奇股份もロボットデータを業界の基盤リソースとすべく、データプラットフォームの構築を計画している。
自動運転よりも複雑な長期戦に

スタッフがロボットに基本動作の反復練習をさせる
ロボット向けデータ訓練センターは、データ駆動、ソフト・ハードの一体化、シーンのクローズドループ化を特徴とする新しい形のインフラであり、単なるAIデータセンターとは比較にならないほど複雑だ。その将来性を左右するのが、異種データを「クローズドループ化」する能力だとされる。実環境にシームレスに接続できるか、異なる仕様のロボット間でデータを横断的に活用できるか、シミュレーションプラットフォームで改良サイクルを加速できるかが鍵となる。
自動運転技術が進化してきた過程と比べると、その複雑さがはっきり見えてくる。自動運転は、既存の道路網や高度に成熟した自動車本体、センサーなどに依存している。突き詰めれば、構造化された環境下での「衝突回避」が主な課題だったが、それでもレベル3(条件付きの自動運転)に到達するまでに10年以上の歳月を要した。一方、人型ロボットは構造化されていないオープンな環境下で無数のタスクを実行する必要があるため、実用化の難易度が指数関数的に増大する。
しかも、ロボット向けデータ訓練センターが解決できるのは、「訓練用教材」の大規模生産にすぎない。教材をどの程度まで整備できるのか、そしてロボットの「頭脳」と「身体」がその教材を効率的に学習・応用できるのかは、依然として未解決の課題として残されている。
人型ロボットが華麗なデモンストレーションの段階を超え、安定性・信頼性・経済性を兼ね備えた「商品」となるまでには、長く厳しい「耐久レース」が待ち受けている。試練の時は始まったばかりだ。
(翻訳・田村広子)
関連記事


関連キーワード
日本企業のDXを促進するプラットフォーム「CONNECTO」
無料コンテンツ公開中





中国メーカーの夏物家電、東南アジアの猛暑対策を支援XxjjpbJ000053_20260714_CBPFN0A001598-300x200.jpg)