「ロボット版AWS」を掲げる中国AI新興、数億円を調達
エンボディドAI(身体性AI)を手がける中国スタートアップ「鯨躍動力」がこのほど実施したシードラウンドで、同業の星海図(Galaxea AI)から数千万元(数億円)を調達した。資金はチーム拡充、製品の量産およびデータ収集・運用に充てられる。
鯨躍動力は2026年設立。創業者で最高経営責任者(CEO)の李広宇博士は、南カリフォルニア大学(USC)で電子工学を専攻し、北京人型ロボットイノベーションセンターでエンボディドAI向けデータおよび高精度マニピュレーションの責任者を務めた人物だ。
同社は「データ+AIモデル+エンドエフェクタ」のクローズドループを中核とし、人の労働力を代替する「Robo Labor(ロボ・レイバー)」の迅速な展開を目指す。李CEOはロボレイバーを、クラウド上でITリソースを柔軟に利用できるアマゾン・ウェブ・サービス(AWS)にたとえる。ロボットをサブスクリプション方式で利用でき、柔軟な拡張性を備え、開封後すぐに利用できるこのソリューションは、これまで人が担ってきた危険度や肉体的負担が大きい反復的な作業を代替する。
3つの強みで生産現場に迅速導入
鯨躍動力は法人向け市場にフォーカスし、ソフト・ハードウェア一体型のソリューションを提供する。李CEOは、超大規模モデルの複雑性を過度に追求する必要はないとし、「リアルデータ+シナリオ化されたモデル+エンドエフェクタ」のクローズドループこそが、迅速な大規模導入につながるとの認識を示す。同社の主な技術的優位性は以下の3点。
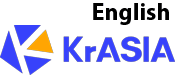
1つ目の独自のデータ収集システム「Ego-centric+UMI」は、サブミリメートル級の位置・姿勢測定と、サブミリ秒級のマルチソースデータ間時刻同期を実現。視覚、力覚、位置・姿勢情報と環境との相互作用データを網羅的に取得し、エッジサイドでリアルタイムのシーンを理解・分析することで、データの収集段階からその品質を保障する。
2つ目は、100万時間規模のデータパイプラインと、システムの運用に人が積極的に関与する「Human-in-the-Loop」を組み合わせた戦略だ。大量のリアルデータで複雑な作業条件に対応させつつ、AIによる即時修正メカニズムを採用。これによりロボットは導入初日から稼働可能となり、運用の過程で継続的に進化していくようになる。
3つ目は、自社開発した3D世界モデルと専門スキルライブラリだ。ロボットは物体を識別するだけでなく、重力や摩擦、物体の変形傾向、相互作用の限界条件まで理解できるようになり、単に「検知して実行する」能力から「認識―予測―自律適応」へと大きく進化する。
生産現場で資材などを効率的に動かす「マテリアルハンドリング」を例にとると、顧客はロボットを既存の業務プロセスへとスムーズに組み込むことができる。ロボットは屋内外を問わずあらゆる環境で自律的に移動し、高精度な搬送と柔軟な積み下ろしが可能になる。同社はすでに、複数の製造大手および物流大手と提携を結んでいる。
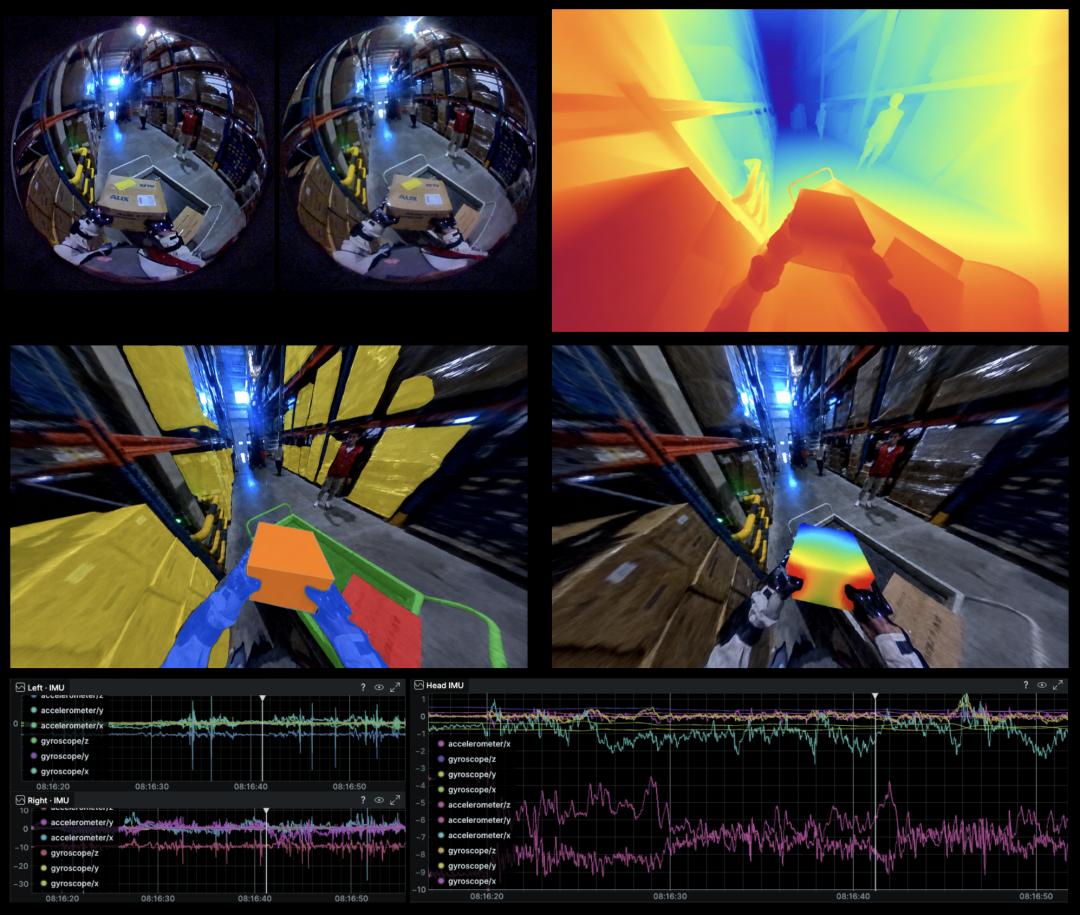
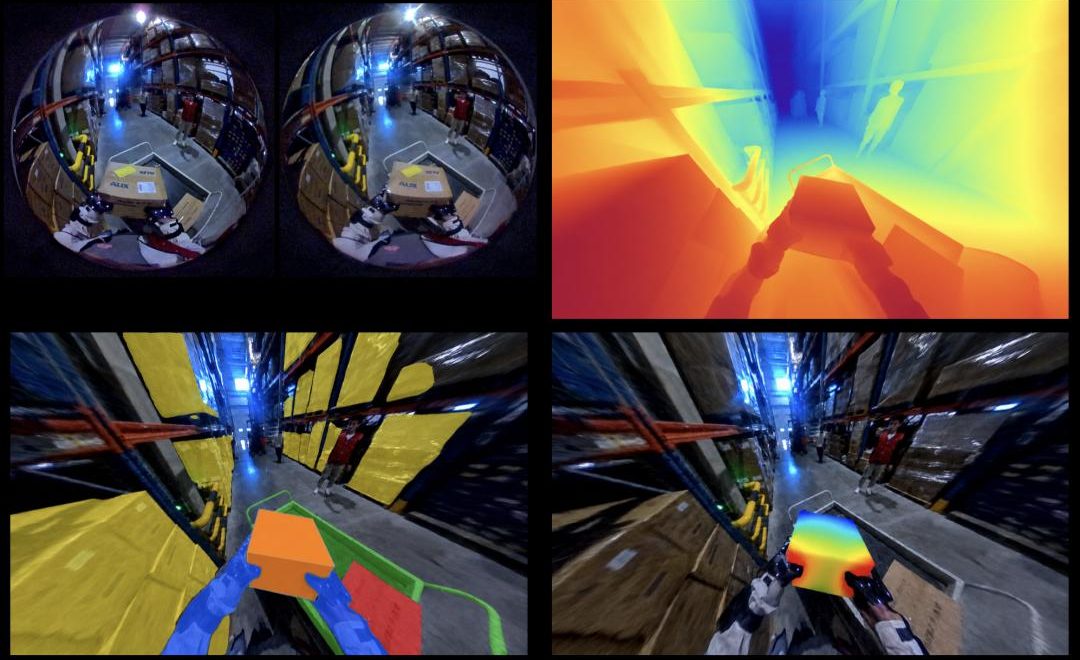
鯨躍動力のデータ収集・可視化
李CEOは、業界の参入障壁が「特定用途向けアルゴリズム」から「システムの性能」へと移り、競争のポイントは「一定の汎化能力を与えるためのデータコスト」と「特定シーンへの大規模展開の密度」になると指摘。「業界の勝者となるためには、特定分野向けの最適解を見つけ出す必要がある」と述べた。
*1元=約23円で計算しています。
(翻訳・田村広子)
関連記事



関連キーワード
日本企業のDXを促進するプラットフォーム「CONNECTO」
無料コンテンツ公開中